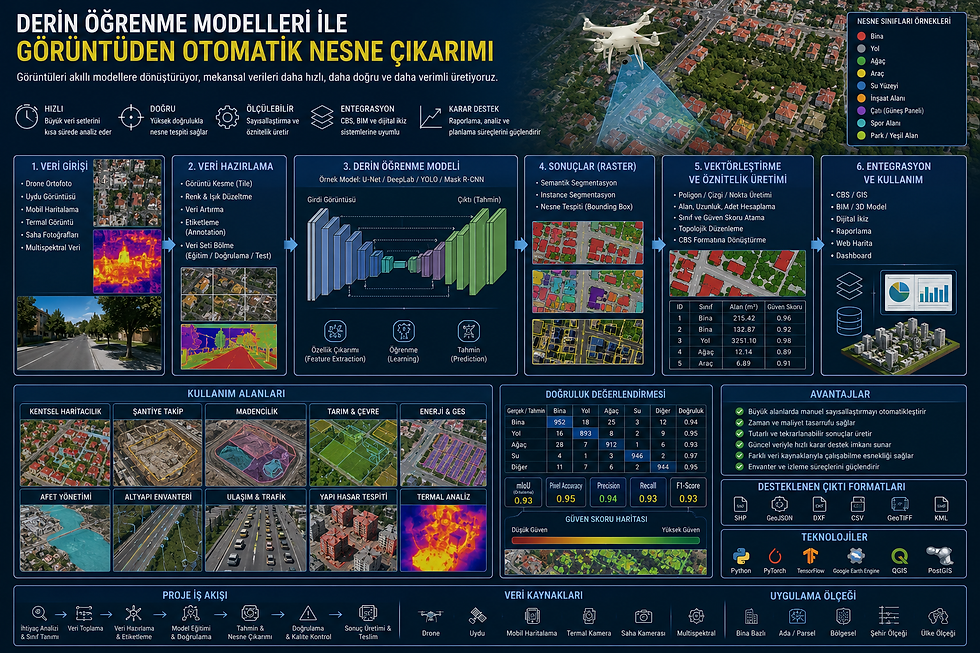
Derin Öğrenme Modelleri ile Görüntüden Otomatik Nesne Çıkarımı: Görsel Veriyi Ölçülebilir, Sınıflandırılabilir ve Karar Destek Üreten Konumsal Bilgiye Dönüştürmek
- Yusuf Ziya Öztürk
- 2 gün önce
- 17 dakikada okunur
Görüntü Artık Sadece Bakılan Bir Veri Değil, Okunabilen Bir Bilgi Kaynağıdır
Haritacılık, geomatik, mühendislik, şehircilik, altyapı yönetimi, maden, inşaat, enerji, tarım, çevre ve tesis yönetimi alanlarında görüntü verisi her geçen gün daha fazla önem kazanıyor. Drone fotoğrafları, ortofotolar, uydu görüntüleri, termal kameralar, mobil haritalama görüntüleri, şantiye fotoğrafları, cephe kayıtları, iç mekân görüntüleri ve saha denetim fotoğrafları artık yalnızca görsel arşiv olarak kullanılmıyor. Bu görüntüler; ölçüm, analiz, sınıflandırma, izleme, envanter, kalite kontrol ve karar destek süreçlerinin temel veri kaynaklarından biri haline geliyor.
Geçmişte bir hava fotoğrafını veya ortofotoyu yorumlamak büyük ölçüde insan gözlemine dayanıyordu. Operatör görüntüyü açar, binaları elle çizer, yolları sayısallaştırır, ağaçları işaretler, hasarlı alanları ayırır, stok sahalarını sınırlar, çatlakları gözle tespit eder veya çatı tiplerini manuel sınıflandırırdı. Bu yöntem hâlâ birçok projede kullanılabilir; ancak büyük veri çağında tek başına yeterli değildir. Çünkü görüntü sayısı artmış, çözünürlük yükselmiş, proje süreleri kısalmış ve güncel veri ihtiyacı çok daha kritik hale gelmiştir.
Bir belediye ortofotosunda binlerce bina olabilir. Bir maden sahasında onlarca stok yığını ve şev bölgesi bulunabilir. Bir GES tesisinde binlerce panelin termal görüntüsü incelenmelidir. Bir şehir modelinde çatı tipleri, güneş paneli potansiyeli, ağaç taçları, yol çizgileri ve kaçak yapılaşma alanları analiz edilmelidir. Bir şantiyede haftalık çekilen görüntülerden imalat ilerlemesi izlenmelidir. Bir afet sonrası görüntü setinden hasarlı yapılar, kapanan yollar, su baskını alanları veya heyelan bölgeleri hızla çıkarılmalıdır. Bu ölçekte manuel yorumlama hem zaman alır hem de kişiye bağlı değişkenlik taşır.
İşte bu noktada derin öğrenme modelleri ile görüntüden otomatik nesne çıkarımı devreye girer. Derin öğrenme, yapay zekânın görüntüleri öğrenmesine, nesneleri tanımasına, sınırlarını belirlemesine, sınıflandırmasına ve sonuçları harita veya veri tabanı çıktısına dönüştürmesine imkân sağlar. Bu teknoloji sayesinde görüntüler yalnızca görsel belge olmaktan çıkar; otomatik olarak okunabilen, analiz edilebilen ve karar süreçlerine bağlanabilen akıllı veri kaynaklarına dönüşür.
Bu yaklaşım, geomatik ve mühendislik iş akışlarında büyük bir dönüşüm sağlar. Drone ortofotosundan bina ayak izi çıkarılabilir. Uydu görüntüsünden arazi örtüsü sınıflandırılabilir. Şantiye fotoğraflarından imalat durumu takip edilebilir. Termal görüntülerden arızalı güneş panelleri tespit edilebilir. Cephe fotoğraflarından çatlak ve yüzey bozuklukları ayrılabilir. Maden sahası görüntülerinden stok, yol, şev ve çalışma alanları segmentlere ayrılabilir. Mobil haritalama görüntülerinden trafik levhası, aydınlatma direği, rögar kapağı, yol çizgisi veya kent mobilyası envanteri çıkarılabilir.
Derin öğrenme destekli otomatik nesne çıkarımı, yalnızca hız kazandırmaz. Aynı zamanda veri üretim standardını güçlendirir, tekrar eden manuel işleri azaltır, büyük alanlarda tutarlı analiz yapılmasını sağlar, periyodik izleme süreçlerini hızlandırır ve CBS, BIM, dijital ikiz, altyapı envanteri, şantiye yönetimi ve karar destek sistemleri için doğrudan kullanılabilir veri üretir.
Görüntüden Otomatik Nesne Çıkarımı Nedir?
Görüntüden otomatik nesne çıkarımı, bir fotoğraf, ortofoto, uydu görüntüsü, termal görüntü veya video karesi içindeki belirli nesnelerin yapay zekâ algoritmalarıyla tespit edilmesi, sınıflandırılması ve gerektiğinde sınırlarının çıkarılması sürecidir.
Bu işlem farklı seviyelerde yapılabilir. Bazı modeller yalnızca görüntüde nesnenin var olup olmadığını söyler. Bazıları nesnenin etrafına kutu çizer. Bazıları nesnenin piksel bazında sınırını çıkarır. Bazıları ise her nesneyi ayrı ayrı segmentlere ayırır. Proje ihtiyacına göre bu yöntemlerden biri veya birkaçı birlikte kullanılabilir.
Örneğin bir drone ortofotosunda binaları tespit etmek istiyoruz. En basit yaklaşım, görüntü üzerinde bina bulunan bölgeleri işaretlemektir. Daha gelişmiş yaklaşım, her binanın etrafına dikdörtgen kutu çizmektir. Daha hassas yaklaşım ise bina çatısının gerçek sınırını piksel bazında çıkararak vektör poligon üretmektir. Eğer her binanın ayrı ayrı bağımsız nesne olarak ayrılması gerekiyorsa instance segmentation kullanılır.
Görüntüden otomatik nesne çıkarımı şu sorulara cevap verebilir:
Bu görüntüde hangi nesneler var?Nesneler görüntünün neresinde?Her nesnenin sınırı nerede?Nesnenin sınıfı nedir?Nesne sağlam mı, hasarlı mı?Nesnenin alanı, uzunluğu veya sayısı ne kadar?Önceki görüntüye göre değişim var mı?Bu nesne CBS katmanı olarak kullanılabilir mi?
Bu soruların cevapları, görüntüyü mühendislik ve yönetim açısından kullanılabilir bilgiye dönüştürür.
Derin Öğrenme Bu Süreçte Ne Yapar?
Derin öğrenme, çok sayıda örnek görüntüden öğrenerek yeni görüntülerde benzer nesneleri tespit edebilen yapay zekâ yöntemidir. İnsan gözü bir binayı, ağacı, yolu veya aracı deneyimle tanır. Derin öğrenme modeli de eğitim verileri üzerinden bu görsel örüntüleri öğrenir.
Model eğitilirken örnek görüntüler ve bu görüntülerdeki nesnelerin etiketleri kullanılır. Örneğin binayı tanıyacak bir model için birçok ortofoto üzerinde bina sınırları işaretlenir. Model bu örneklerden çatı dokusu, renk, şekil, gölge, kenar, bağlam ve çevre ilişkilerini öğrenir. Daha sonra daha önce görmediği yeni bir ortofotoda binaları bulmaya çalışır.
Derin öğrenme modelleri görüntüdeki bilgiyi katman katman işler. İlk katmanlarda kenar, renk geçişi, basit doku ve çizgi gibi özellikler öğrenilir. Daha ileri katmanlarda çatı dokusu, yol çizgisi, ağaç taç formu, panel dizisi, araç şekli veya çatlak örüntüsü gibi daha anlamlı özellikler oluşur. Son aşamada model, bu özelliklere dayanarak nesneyi sınıflandırır veya sınırını üretir.
Bu sürecin başarısı birkaç ana faktöre bağlıdır:
Eğitim verisinin kalitesi
Etiketlerin doğruluğu
Görüntü çözünürlüğü
Nesne sınıflarının net tanımlanması
Model mimarisinin uygunluğu
Görüntülerin çeşitliliği
Veri ön işleme kalitesi
Model sonrası kalite kontrol süreci
Kullanım amacına uygun çıktı formatı
Derin öğrenme, güçlü bir otomasyon sağlar; ancak doğru veri ve uzman kontrolü olmadan güvenilir sonuç üretmesi beklenmemelidir. Özellikle geomatik ve mühendislik projelerinde yapay zekâ sonucu mutlaka doğruluk analizi ve teknik yorumla desteklenmelidir.
Nesne Tespiti, Segmentasyon ve Sınıflandırma Arasındaki Fark
Görüntüden otomatik nesne çıkarımı denildiğinde birkaç farklı teknik yaklaşım vardır. Bunlar benzer görünse de sonuçları ve kullanım alanları farklıdır.
Görüntü Sınıflandırma
Görüntü sınıflandırma, bir görüntünün genel olarak hangi sınıfa ait olduğunu belirler. Örneğin bir fotoğrafın “şantiye”, “orman”, “tarım alanı”, “maden sahası” veya “yerleşim alanı” olduğunu söyleyebilir. Ancak görüntü içindeki nesnelerin sınırlarını vermez.
Bu yöntem genel kategorizasyon için uygundur; fakat harita üretimi için çoğu zaman yeterli değildir.
Nesne Tespiti
Nesne tespiti, görüntü içindeki nesneleri bulur ve genellikle etraflarına kutu çizer. Örneğin görüntüdeki araçlar, güneş panelleri, elektrik direkleri, iş makineleri veya bina grupları dikdörtgen kutularla tespit edilebilir.
Bu yöntem sayım, envanter ve hızlı tespit için faydalıdır. Ancak nesnenin gerçek sınırını vermez.
Semantik Segmentasyon
Semantik segmentasyon, görüntüdeki her pikseli bir sınıfa atar. Örneğin her piksel bina, yol, ağaç, zemin, su veya gölge sınıfına ayrılabilir. Bu yöntem arazi örtüsü, bina sınırı, yol yüzeyi ve su baskını alanı çıkarımı için çok değerlidir.
Ancak semantik segmentasyon aynı sınıftaki ayrı nesneleri birbirinden ayırmayabilir. Örneğin bitişik iki bina tek bina alanı gibi görünebilir.
Instance Segmentation
Instance segmentation, her nesneyi ayrı örnek olarak ayırır. Örneğin görüntüdeki her araç, her bina, her ağaç veya her panel ayrı nesne olarak tespit edilir. Bu yöntem sayım ve envanter için güçlüdür.
Panoptic Segmentation
Panoptic segmentation, semantik ve instance segmentasyonun birleşimi gibi düşünülebilir. Hem sınıf bilgisi hem de nesne örnekleri birlikte yönetilir. Gelişmiş şehir, yol, tesis ve dijital ikiz uygulamalarında faydalı olabilir.
Geomatik projelerde çoğu zaman semantik segmentasyon ve instance segmentation birlikte kullanılır. Örneğin bir ortofotoda önce bina alanları semantik olarak çıkarılır, sonra her bina ayrı poligona dönüştürülür.
Görüntü Kaynakları: Hangi Veriler Kullanılabilir?
Derin öğrenme ile nesne çıkarımı çok farklı görüntü kaynaklarında uygulanabilir. Her veri kaynağının avantajı ve zorluğu farklıdır.
Drone Görüntüleri
Drone fotoğrafları yüksek çözünürlüklüdür ve detaylı analiz için çok uygundur. Bina, yol, araç, çatı, panel, stok sahası, şantiye imalatı, tarımsal alan ve altyapı elemanları drone görüntülerinden çıkarılabilir. En büyük avantaj, görüntü çözünürlüğünün saha ihtiyacına göre planlanabilmesidir.
Ortofoto
Ortofoto, geometrik olarak düzeltilmiş ve koordinatlı görüntüdür. Nesne çıkarımı sonrası sonuçların doğrudan harita veya CBS ortamına aktarılması açısından çok değerlidir. Bina ayak izi, yol çizgisi, parsel kullanımı, yeşil alan, stok sınırı ve arazi örtüsü çıkarımı için idealdir.
Uydu Görüntüleri
Uydu görüntüleri geniş alanları kapsar. Şehir değişimi, arazi örtüsü, tarım, orman, su yüzeyi, afet alanı ve çevresel izleme için kullanılır. Ancak çözünürlük drone görüntülerine göre daha düşük olabilir. Nesne boyutu ve görüntü çözünürlüğü model başarısını doğrudan etkiler.
Termal Görüntüler
Termal görüntüler sıcaklık farklarını gösterir. GES panellerinde arıza tespiti, bina ısı kaçakları, endüstriyel sıcak nokta analizi, yangın sonrası izleme ve enerji tesisleri için çok değerlidir. Termal görüntülerde nesne çıkarımı farklı kalibrasyon ve yorum gerektirir.
Multispektral Görüntüler
Multispektral veriler farklı spektral bantlar içerir. Tarım, bitki sağlığı, arazi örtüsü, su stresi, orman ve çevresel analizlerde kullanılır. Derin öğrenme modelleri bu bantları RGB görüntülere göre daha zengin bilgiyle işleyebilir.
Mobil Haritalama Görüntüleri
Araç üstü kameralar veya mobil haritalama sistemleri yol koridoru boyunca görüntü toplar. Trafik levhası, yol çizgisi, aydınlatma direği, bariyer, rögar kapağı, tabela, kent mobilyası ve cephe envanteri çıkarımı için kullanılabilir.
Şantiye ve Saha Fotoğrafları
Telefon veya kamera ile çekilen saha fotoğrafları da derin öğrenme ile analiz edilebilir. İş güvenliği ekipmanları, imalat durumu, çatlak, hasar, malzeme stokları veya kalite kontrol unsurları tespit edilebilir. Ancak bu görüntüler genellikle farklı açı, ışık ve ölçek içerdiği için eğitim verisi daha çeşitli olmalıdır.
Eğitim Verisi: Modelin Başarısının Temel Kaynağı
Derin öğrenme modelinin başarısı doğrudan eğitim verisinin kalitesiyle ilgilidir. Model ne kadar gelişmiş olursa olsun, yanlış veya yetersiz etiketlenmiş veriyle eğitilirse güvenilir sonuç üretmez.
Eğitim verisi oluştururken şu konular önemlidir:
Görüntüler proje koşullarını temsil etmelidir.
Farklı ışık, mevsim, açı ve zemin koşulları bulunmalıdır.
Nesne sınıfları açık tanımlanmalıdır.
Etiketler tutarlı çizilmelidir.
Bitişik nesneler doğru ayrılmalıdır.
Gölge, yansıma ve kapalı alanlar için kurallar belirlenmelidir.
Eğitim, doğrulama ve test setleri ayrılmalıdır.
Sınıf dengesizliği kontrol edilmelidir.
Etiket hataları kalite kontrolden geçirilmelidir.
Örneğin bina çıkarımı yapılacaksa, “bina” sınıfının kapsamı net olmalıdır. Sadece çatı mı bina kabul edilecek? Saçak dahil mi? Balkon dahil mi? Gölge alanlar nasıl değerlendirilecek? Geçici yapılar bina mı sayılacak? Bu kararlar net olmazsa model tutarsız öğrenir.
Benzer şekilde şantiye imalat tespiti yapılacaksa, tamamlanmış betonarme, kalıp, donatı, iskele, malzeme yığını ve iş makinesi gibi sınıfların net ayrılması gerekir. Eğitim verisindeki belirsizlik, model çıktısında belirsizlik olarak geri döner.
Görüntü Etiketleme Süreci
Görüntü etiketleme, derin öğrenme projesinin en fazla emek isteyen aşamalarından biridir. Etiketleme; nesnelerin kutu, poligon, maske veya piksel sınıfı olarak işaretlenmesi anlamına gelir. Modelin ne öğreneceği bu etiketlere bağlıdır.
Etiketleme türleri:
Kutucuk etiketleme
Poligon etiketleme
Piksel bazlı maske etiketleme
Çizgi ve aks etiketleme
Nokta etiketleme
Sınıf etiketi atama
Kutucuk etiketleme nesne tespiti için hızlıdır. Poligon ve maske etiketleme daha zahmetlidir; ancak harita üretimi için daha doğru sınırlar sağlar. Örneğin bina ayak izi çıkarımı için poligon etiketleme gerekir. Araç sayımı için kutu etiketleme yeterli olabilir. Yol yüzeyi veya su baskını alanı için semantik maske daha uygundur.
Etiketleme sürecinde kalite kontrol çok önemlidir. Farklı kişilerin çizdiği sınırlar arasında tutarlılık sağlanmalıdır. Aksi halde model, aynı nesneyi farklı biçimlerde öğrenir. Bu nedenle etiketleme rehberi hazırlanmalı ve örneklerle standart belirlenmelidir.
Model Eğitimi ve Doğrulama
Eğitim verisi hazırlandıktan sonra model eğitilir. Model, görüntü ve etiket çiftleri üzerinden nesneleri öğrenir. Eğitim sürecinde modelin performansı doğrulama verisiyle izlenir. Çok az eğitim yapılırsa model yeterince öğrenmez. Çok fazla ve kontrolsüz eğitim yapılırsa model eğitim verisine aşırı uyum sağlayabilir ve yeni görüntülerde başarısız olabilir.
Model doğrulama aşamasında şu metrikler kullanılabilir:
Precision
Recall
F1-score
Intersection over Union
Mean Average Precision
Pixel accuracy
Confusion matrix
Sınıf bazlı doğruluk
Hata örnekleri analizi
Geomatik projelerde yalnızca genel doğruluk yeterli değildir. Sınıf bazlı doğruluk çok önemlidir. Örneğin model bina sınıfında başarılı ama dar yolları kaçırıyor olabilir. Ya da büyük ağaçları buluyor ama küçük fidanları tespit edemiyor olabilir. Maden sahasında stok yığınlarını iyi ayırıyor ama şevleri zeminle karıştırıyor olabilir. Bu nedenle sonuçlar sınıf bazında değerlendirilmelidir.
Ayrıca model çıktısının mühendislik kullanımına uygunluğu da test edilmelidir. Örneğin bina segmentasyonu görsel olarak iyi görünse bile poligon sınırları çok kırıklıysa CAD/CBS kullanımında temizleme gerekebilir. Bu nedenle model sonrası vektörleştirme ve genelleştirme süreçleri de kalite kontrolün parçasıdır.
Görüntü Ön İşleme: Model Başarısını Artıran Hazırlık
Derin öğrenme modellerinin başarısı için görüntülerin uygun şekilde hazırlanması gerekir. Ham görüntüler doğrudan modele verilebilir; ancak çoğu projede ön işleme yapılması daha iyi sonuç verir.
Ön işleme adımları şunlar olabilir:
Görüntülerin tile parçalara ayrılması
Çözünürlük standardizasyonu
Renk dengesi düzeltmesi
Gölge ve kontrast iyileştirme
NoData alanlarının temizlenmesi
Ortofoto kenar boşluklarının çıkarılması
Koordinatlı tile üretimi
Görüntü format dönüşümü
Veri artırma işlemleri
Bulanık görüntülerin ayıklanması
Özellikle büyük ortofotolarda tile mantığı önemlidir. 20.000 x 20.000 piksel büyüklüğünde bir ortofoto doğrudan modele verilemez. Görüntü belirli boyutlarda parçalara ayrılır. Model her parçayı işler. Daha sonra sonuçlar yeniden birleştirilir. Bu süreçte tile kenarlarında nesne bölünmeleri oluşabileceği için bindirmeli tile yöntemi kullanılabilir.
Görüntü ön işleme, modelin daha tutarlı sonuç üretmesine yardımcı olur. Ancak aşırı renk düzeltme veya agresif filtreleme görüntüdeki gerçek bilgiyi bozabilir. Bu nedenle ön işleme proje amacına göre dikkatli seçilmelidir.
Model Sonrası İşleme: AI Çıktısını Harita Verisine Dönüştürmek
Derin öğrenme modeli görüntü üzerinde nesne tespiti veya segmentasyon sonucu üretir. Ancak bu sonuç çoğu zaman doğrudan teslim verisi değildir. Özellikle geomatik projelerde model çıktısının CBS, CAD, BIM veya raporlama sistemlerine uygun hale getirilmesi gerekir.
Model sonrası işlemler şunlar olabilir:
Maskelerin poligona dönüştürülmesi
Küçük gürültü alanlarının temizlenmesi
Deliklerin kapatılması
Sınırların yumuşatılması veya sadeleştirilmesi
Bitişik nesnelerin ayrılması
Koordinat sisteminin korunması
Alan ve uzunluk hesaplarının yapılması
Sınıf etiketlerinin öznitelik tablosuna yazılması
Güven skorlarının kaydedilmesi
CBS katmanı üretimi
CAD/DXF çıktısı hazırlanması
Rapor ve harita görselleri oluşturulması
Örneğin bina segmentasyonu sonucunda model piksel maskesi üretir. Bu maske poligona çevrilir. Küçük hatalı parçalar temizlenir. Çok kırıklı sınırlar uygun toleransla sadeleştirilir. Bina poligonlarına alan, çevre, güven skoru ve sınıf bilgisi eklenir. Sonuç SHP, GeoJSON, DXF veya GeoPackage olarak teslim edilebilir.
Model sonrası işleme, AI sonucunu mühendislik verisine dönüştüren en kritik aşamalardan biridir.
Ortofotodan Bina Ayak İzi Çıkarımı
Derin öğrenme ile görüntüden nesne çıkarımının en yaygın kullanım alanlarından biri bina ayak izi çıkarımıdır. Drone veya uydu ortofotolarından binaların otomatik sınırlarının çıkarılması; şehir modeli, imar kontrolü, kentsel dönüşüm, afet yönetimi, CBS güncelleme ve dijital ikiz projelerinde büyük değer sağlar.
Bina çıkarımı şu süreçleri destekler:
Bina envanteri oluşturma
Kaçak yapı veya yeni yapı tespiti
Kentsel dönüşüm alan analizi
Çatı alanı hesaplama
Güneş enerjisi potansiyeli değerlendirme
3B şehir modeli üretimi
Afet sonrası hasar ön değerlendirmesi
Belediyelerde güncel yapı katmanı oluşturma
Bina çıkarımında zorluklar da vardır. Çatı renkleri farklı olabilir. Gölge alanları sınırı bozabilir. Ağaçlar çatıyı kapatabilir. Bitişik nizam yapılarda bina ayrımı zorlaşır. Saçaklar ayak izi sınırını farklı gösterebilir. Bu nedenle model sonrası uzman kontrolü önemlidir.
Yol, Kaldırım ve Ulaşım Elemanlarının Çıkarımı
Yol yüzeyi, kaldırım, şerit çizgisi, refüj, kavşak, yaya geçidi, otopark çizgisi, bariyer ve trafik levhaları görüntüden çıkarılabilir. Bu alan özellikle belediyeler, karayolu projeleri, akıllı şehir sistemleri ve ulaşım planlaması için değerlidir.
Drone ortofotosu veya mobil haritalama görüntüleri üzerinden:
Yol yüzeyleri segmentlere ayrılabilir.
Kaldırımlar tespit edilebilir.
Yol çizgileri çıkarılabilir.
Trafik levhası envanteri oluşturulabilir.
Otopark alanları belirlenebilir.
Yol yüzey bozuklukları analiz edilebilir.
Şerit düzeni ve kavşak geometrisi incelenebilir.
Yol tespiti görüntü bağlamına çok duyarlıdır. Beton saha, otopark, fabrika iç yolu veya meydan gibi alanlar yol yüzeyine benzeyebilir. Bu nedenle eğitim verisinin farklı ortamları kapsaması gerekir.
Ağaç, Yeşil Alan ve Bitki Örtüsü Çıkarımı
Derin öğrenme modelleri, yüksek çözünürlüklü görüntülerden ağaç taçları, yeşil alanlar, tarımsal parseller, bitki türleri veya bitki sağlığına ilişkin sınıfları çıkarabilir. Bu alan belediye yeşil alan yönetimi, tarım, çevre izleme, orman envanteri ve enerji hattı risk analizi için önemlidir.
Kullanım örnekleri:
Ağaç taçlarının otomatik tespiti
Ağaç sayımı
Park ve yeşil alan sınırlarının çıkarılması
Tarımsal ürün sınıflandırması
Bitki sağlığı analizi
Enerji hattına yaklaşan bitki örtüsü tespiti
Orman açıklıkları ve kaçak kesim analizi
Şehir ısı adası çalışmalarına altlık üretimi
Multispektral görüntüler bitki analizlerinde çok güçlüdür. RGB görüntüyle yalnızca görsel form ve renk bilgisi kullanılırken, multispektral bantlarla bitki sağlığı ve spektral özellikler de modele dahil edilebilir.
GES ve Enerji Tesislerinde Otomatik Nesne Çıkarımı
Güneş enerji santralleri, derin öğrenme tabanlı görüntü analizleri için çok uygun alanlardan biridir. Drone RGB ve termal görüntüleri üzerinden panel dizileri, panel arızaları, sıcak noktalar, kırık paneller, kirlenme bölgeleri, inverter alanları, yollar ve çevresel engeller tespit edilebilir.
GES projelerinde otomatik çıkarım şu amaçlarla kullanılabilir:
Panel sayımı
Panel dizisi tespiti
Termal sıcak nokta analizi
Arızalı panel sınıflandırması
Kirlenme veya gölgelenme tespiti
Bitki örtüsü riski analizi
Bakım önceliklendirme
Raporlama ve harita üretimi
Termal görüntülerde arıza tespiti yapılırken görüntü çekim koşulları önemlidir. Güneşlenme, rüzgâr, panel yük durumu, çekim açısı ve kamera kalibrasyonu sonuçları etkileyebilir. Bu nedenle AI sonucu mutlaka enerji uzmanlığı ve saha doğrulamasıyla desteklenmelidir.
Şantiye İlerleme ve İmalat Takibinde Kullanım
Şantiye görüntülerinde derin öğrenme ile imalat ilerlemesi, malzeme stokları, iş makineleri, güvenlik ekipmanları, kalıp, donatı, betonarme, cephe elemanları veya iş güvenliği ihlalleri tespit edilebilir. Drone ortofotoları, sabit kamera görüntüleri ve saha fotoğrafları bu amaçla kullanılabilir.
Şantiye uygulamalarında otomatik nesne çıkarımı şu süreçleri destekler:
Haftalık ilerleme takibi
Kazı ve dolgu alanlarının ayrılması
Malzeme stok alanlarının tespiti
İş makinesi sayımı
Betonarme imalat durumunun analizi
Çatı ve cephe ilerleme kontrolü
İş güvenliği ekipman tespiti
Şantiye düzeni ve lojistik alan kontrolü
Hakediş ve raporlama süreçlerine altlık
Bu alanda en büyük zorluk şantiyelerin sürekli değişmesidir. Aynı alan farklı tarihlerde çok farklı görünebilir. Bu nedenle zaman serisi mantığı ve proje özelinde eğitim verisi önemlidir.
Maden Sahalarında Görüntüden Otomatik Nesne Çıkarımı
Maden sahalarında drone görüntülerinden stok yığınları, pasa sahaları, çalışma yolları, kazı alanları, su birikimleri, şevler, makineler, bitki örtüsü ve rehabilitasyon alanları otomatik çıkarılabilir.
Bu analizler şu alanlarda kullanılabilir:
Stok sınırı tespiti
Hacim hesabı için poligon üretimi
Pasa sahası izleme
Kazı ilerleme takibi
Yol ve rampa analizi
Su birikimi ve drenaj kontrolü
Şev risk bölgelerinin ön tespiti
Rehabilitasyon alanlarının izlenmesi
Üretim planlama ve raporlama
Maden sahalarında görüntü koşulları zor olabilir. Toprak ve kaya renkleri benzer görünebilir. Gölge, toz, makine izleri ve geçici yığınlar sınıflandırmayı zorlaştırabilir. Bu nedenle maden özelinde eğitilmiş modeller, genel modellerden daha başarılı olur.
Afet Yönetimi ve Hasar Tespitinde Kullanım
Afet sonrası hızlı görüntü analizi, derin öğrenmenin en değerli kullanım alanlarından biridir. Deprem, sel, heyelan, yangın, fırtına veya taşkın sonrası drone ve uydu görüntüleri üzerinden hasarlı yapılar, kapanan yollar, su altında kalan alanlar, yıkıntılar, heyelan bölgeleri ve yangın etkisi otomatik tespit edilebilir.
Afet yönetiminde otomatik nesne çıkarımı şu faydaları sağlar:
Hızlı durum tespiti
Hasarlı yapıların ön sınıflandırması
Ulaşım yollarındaki engellerin belirlenmesi
Sel ve su baskını alanlarının çıkarılması
Heyelan kütlesi ve etki alanı tespiti
Yangın sonrası etkilenen alan analizi
Müdahale önceliği belirleme
Kurumlara hızlı harita ve rapor üretme
Bu tür projelerde hız çok önemlidir; ancak hata toleransı da düşüktür. Bu nedenle AI sonucu hızlı ön analiz olarak değerlendirilmeli ve kritik kararlar uzman doğrulamasıyla desteklenmelidir.
Cephe, Çatı ve Yapı Hasarı Analizlerinde Kullanım
Yakın mesafe fotoğrafları, drone cephe görüntüleri ve yüksek çözünürlüklü ortofotolar üzerinden çatlak, sıva dökülmesi, yüzey bozulması, nem lekesi, korozyon, kırık eleman, çatı hasarı veya cephe deformasyon izleri otomatik tespit edilebilir.
Kullanım alanları:
Tarihi yapı bozulma analizi
Cephe bakım planlama
Çatı hasar tespiti
GES panel montaj alanı kontrolü
Endüstriyel yapı yüzey denetimi
Köprü ve viyadük görsel hasar analizi
Beton çatlak tespiti
Restorasyon öncesi bozulma haritalama
Bu alanda çözünürlük çok önemlidir. İnce çatlakları tespit etmek için görüntü kalitesi, ışık, odak ve ölçek yeterli olmalıdır. Genel drone görüntüsü küçük çatlaklar için yetersiz kalabilir. Bu nedenle çekim planı, AI analiz hedefiyle uyumlu yapılmalıdır.
Altyapı ve Kent Envanteri İçin Nesne Çıkarımı
Mobil haritalama ve sokak görüntüleri üzerinden kent envanteri otomatik çıkarılabilir. Trafik levhaları, aydınlatma direkleri, rögar kapakları, çöp konteynerleri, duraklar, yangın hidrantları, elektrik panoları, yol çizgileri, bariyerler ve kent mobilyaları tespit edilebilir.
Bu çıktı belediyeler ve altyapı kurumları için çok değerlidir. Çünkü saha envanteri manuel yapıldığında zaman alır. AI destekli çıkarım, ön envanter oluşturur. Saha ekipleri bu envanteri mobil CBS ile doğrulayabilir ve güncelleyebilir.
Bu yaklaşım şu iş akışını oluşturabilir:
Görüntü veya mobil haritalama verisi toplanır.
AI modeli nesneleri tespit eder.
Nesneler konumla ilişkilendirilir.
CBS katmanı oluşturulur.
Saha ekipleri doğrulama yapar.
Envanter yönetim sistemine aktarılır.
Böylece görüntü verisi kurumsal altyapı envanterine dönüşür.
CBS Entegrasyonu: AI Çıktısını Harita Katmanına Dönüştürmek
Geomatik projelerde AI çıktısının asıl değeri, CBS ortamına entegre edildiğinde ortaya çıkar. Görüntü üzerinde tespit edilen nesneler koordinatlı poligon, çizgi veya nokta katmanlarına dönüştürülmelidir. Böylece analiz, raporlama, sorgulama ve karar destek süreçlerinde kullanılabilir.
CBS entegrasyonu şu çıktıları sağlayabilir:
Bina poligonları
Yol ve kaldırım çizgileri
Ağaç noktaları veya taç poligonları
Stok sahası sınırları
Hasar alanı poligonları
Panel arıza noktaları
Kent mobilyası envanteri
Su baskını alanları
Tarım sınıfları
Çevresel etki bölgeleri
Bu katmanlara sınıf, güven skoru, tarih, veri kaynağı, model versiyonu, alan, uzunluk ve açıklama gibi öznitelikler eklenebilir. Böylece AI sonucu izlenebilir ve denetlenebilir hale gelir.
BIM ve Dijital İkiz Entegrasyonu
Görüntüden otomatik nesne çıkarımı yalnızca CBS için değil, BIM ve dijital ikiz süreçleri için de değer üretir. Özellikle mevcut yapı, tesis, şehir veya şantiye dijital ikizlerinde görüntü analizi, model güncelleme ve varlık tespiti için kullanılabilir.
Örneğin:
Drone görüntüsünden yeni yapılaşma tespit edilip şehir dijital ikizine eklenebilir.
Şantiye görüntüsünden tamamlanan imalatlar BIM ilerleme modeline bağlanabilir.
Tesis görüntülerinden ekipman envanteri oluşturulabilir.
Cephe görüntülerinden bakım ihtiyacı dijital ikize işlenebilir.
GES termal analiz sonuçları panel varlıklarına bağlanabilir.
Bu entegrasyonda önemli konu, AI çıktısının yalnızca görsel sonuç olarak kalmamasıdır. Nesneler kimlik, konum, sınıf, tarih ve durum bilgisiyle dijital sistemlere aktarılmalıdır.
Zaman Serisi ve Değişim Analizi
Aynı alan farklı tarihlerde görüntülendiğinde, derin öğrenme modelleri zaman içindeki değişimleri analiz edebilir. Bu, şantiye, maden, çevre, tarım, şehircilik ve afet yönetimi için çok değerlidir.
Zaman serisi analizinde şu sorular cevaplanabilir:
Yeni bina yapılmış mı?Şantiye imalatı ilerlemiş mi?Stok yığını büyümüş mü?Su baskını alanı genişlemiş mi?Bitki örtüsü değişmiş mi?Yol kapanmış mı?GES panel arızası artmış mı?Restorasyon sonrası yüzey durumu değişmiş mi?
Bu analiz için görüntülerin aynı koordinat sisteminde, benzer çözünürlükte ve uygun karşılaştırma standardında olması gerekir. Aksi halde gerçek değişim ile görüntü farkı karışabilir. AI destekli değişim analizi, doğru veri hazırlığıyla çok güçlü sonuçlar verir.
Güven Skoru ve İnsan Kontrolü
Derin öğrenme modelleri genellikle her tespit için bir güven skoru üretir. Bu skor, modelin tahmininden ne kadar emin olduğunu gösterir. Ancak yüksek güven skoru her zaman doğru sonuç anlamına gelmez; düşük güven skoru da her zaman yanlış demek değildir. Bu nedenle güven skorları mühendislik kontrolüyle birlikte değerlendirilmelidir.
Pratik iş akışında şu yöntem kullanılabilir:
Yüksek güvenli tespitler otomatik kabul edilebilir.
Orta güvenli tespitler uzman kontrolüne gönderilir.
Düşük güvenli tespitler filtrelenir veya manuel doğrulanır.
Kritik sınıflar için tüm sonuçlar kontrol edilir.
Hatalı örnekler yeniden eğitim verisine eklenir.
Bu yaklaşım, AI ile insan uzmanlığını dengeler. Özellikle altyapı, hasar tespiti, restorasyon ve mühendislik kararları gibi kritik alanlarda insan kontrolü vazgeçilmezdir.
Modelin Saha Koşullarına Uyum Problemi
Derin öğrenme modelleri, eğitildikleri veriyle benzer görüntülerde daha iyi çalışır. Farklı şehir, farklı mevsim, farklı drone yüksekliği, farklı kamera, farklı ışık, farklı zemin rengi veya farklı yapı tipi model başarısını düşürebilir. Buna domain shift denir.
Örneğin İstanbul’da eğitilmiş bina modeli, kırsal bölgelerdeki tek katlı yapıları kaçırabilir. Yaz mevsimi görüntüleriyle eğitilmiş bitki modeli, kış görüntülerinde başarısız olabilir. Beton şantiyede eğitilmiş model, toprak zeminli maden sahasında aynı başarıyı göstermeyebilir.
Bu nedenle modelin saha koşullarına uyumu test edilmelidir. Gerekirse proje özelinde fine-tuning yapılmalıdır. Yani mevcut model, yeni saha verisinden küçük bir etiketli örnek setiyle yeniden uyarlanabilir. Bu yöntem özel projelerde doğruluğu ciddi şekilde artırır.
Veri Gizliliği ve Güvenlik
Görüntü verileri bazen hassas bilgiler içerebilir. Endüstriyel tesisler, kamu alanları, özel mülkler, altyapı tesisleri, güvenlik bölgeleri veya kişisel veriler görüntülerde yer alabilir. AI analizlerinde veri güvenliği dikkate alınmalıdır.
Dikkat edilmesi gereken konular:
Hassas görüntüler yetkisiz ortama yüklenmemelidir.
Bulut tabanlı AI servisleri kullanılacaksa veri güvenliği değerlendirilmelidir.
İnsan yüzleri, araç plakaları veya özel alanlar gerektiğinde bulanıklaştırılmalıdır.
Kurumsal projelerde yerel işlem tercih edilebilir.
Model çıktıları ve görüntü arşivi erişim kontrollü olmalıdır.
Veri paylaşımı sözleşme ve mevzuata uygun yapılmalıdır.
Bu konu özellikle belediye, sanayi, savunma, enerji ve özel mülk projelerinde önemlidir.
Otomatik Nesne Çıkarımı Her Zaman Tam Otomatik midir?
“Derin öğrenme ile otomatik nesne çıkarımı” ifadesi bazen tamamen insan müdahalesi olmadan kusursuz sonuç beklentisi oluşturabilir. Gerçekçi yaklaşım daha dengelidir. AI, büyük bir hız ve otomasyon sağlar; ancak mühendislik projelerinde kalite kontrol, düzeltme ve yorum süreci gereklidir.
En sağlıklı iş akışı şu şekildedir:
Görüntü verisi hazırlanır.
Model otomatik tespit veya segmentasyon yapar.
Sonuçlar güven skoruna göre filtrelenir.
CBS/CAD katmanı üretilir.
Uzman kontrolü yapılır.
Hatalar düzeltilir.
Nihai veri raporlanır ve teslim edilir.
Hatalı örnekler modelin geliştirilmesi için arşivlenir.
Bu yapı, hem hız hem doğruluk sağlar. AI insanın yerine geçmekten çok, insanın yaptığı tekrar eden seçme ve çizme işlerini azaltır. Uzman daha çok kontrol, yorum ve karar verme aşamasına odaklanır.
Kullanım Alanlarına Göre Örnek Sınıf Setleri
Proje türüne göre çıkarılacak nesne sınıfları değişir. Doğru sınıf seti belirlemek, model başarısı için önemlidir.
Belediye ve Şehircilik
Bina
Yol
Kaldırım
Ağaç
Park alanı
Araç
Çatı tipi
Havuz
Kent mobilyası
Kaçak yapı şüphesi
Şantiye
Kazı alanı
Betonarme imalat
Kalıp
Donatı
Malzeme stoku
İş makinesi
İskele
Güvenlik bariyeri
Tamamlanmış cephe
Açık risk alanı
Maden
Stok yığını
Pasa sahası
Şev
Yol
Su birikimi
Araç/makine
Bitki
Kazı yüzeyi
Rehabilitasyon alanı
GES ve Enerji
Panel
Arızalı panel
Sıcak nokta
İnverter alanı
Kablo güzergâhı
Gölgeleme nesnesi
Bitki riski
Bakım yolu
Tarihi Yapı ve Restorasyon
Çatlak
Sıva kaybı
Taş kaybı
Nem lekesi
Malzeme değişimi
Bezeme alanı
Kemer
Kubbe
Duvar yüzeyi
Bozulma bölgesi
Bu sınıf setleri proje hedefiyle birlikte netleştirilmelidir. Gereksiz sınıf sayısı modeli zorlaştırır; eksik sınıf ise çıktının değerini düşürür.
Teslim Çıktıları
Derin öğrenme modelleri ile görüntüden otomatik nesne çıkarımı projelerinde teslim çıktıları kullanım amacına göre değişebilir. Yaygın çıktılar şunlardır:
Sınıflandırılmış raster maske
Nesne tespit kutuları
Segmentasyon maskeleri
Koordinatlı poligon katmanları
Nokta veya çizgi katmanları
SHP / GeoJSON / GeoPackage verileri
DXF / DWG çizim çıktıları
CSV / Excel öznitelik tabloları
Alan, sayı ve uzunluk raporları
Doğruluk değerlendirme raporu
Model güven skoru haritaları
Önce-sonra değişim haritaları
Web harita veya dashboard çıktısı
PDF teknik rapor
Model eğitimi ve veri seti dokümantasyonu
Teslimde model versiyonu, eğitim verisi kapsamı, doğruluk metrikleri, sınıf tanımları ve sınırlamalar açıkça belirtilmelidir. Bu, sonuçların doğru yorumlanmasını sağlar.
Kalite Kontrol ve Doğruluk Raporlaması
AI tabanlı nesne çıkarımında kalite kontrol raporu olmazsa sonuçların güvenilirliği sorgulanır. Özellikle mühendislik hizmeti olarak sunulan projelerde doğruluk değerlendirmesi mutlaka yapılmalıdır.
Kalite kontrol raporunda şu bilgiler bulunabilir:
Kullanılan görüntü kaynağı
Çözünürlük ve tarih bilgisi
Sınıf listesi
Eğitim ve test veri kapsamı
Model doğruluk metrikleri
Sınıf bazlı precision/recall değerleri
Örnek hata görselleri
Kontrol edilen alanlar
Manuel doğrulama yöntemi
CBS katmanı üretim adımları
Bilinen sınırlamalar
Tavsiye edilen kullanım amacı
Bu rapor, kullanıcının AI çıktısını hangi güven seviyesinde kullanabileceğini anlamasını sağlar. Örneğin sonuç ön analiz için uygunsa bu belirtilmelidir. Resmi aplikasyon veya hassas proje kararı için ek saha doğrulaması gerekiyorsa bu açıkça yazılmalıdır.
UTEK Mühendislik Yaklaşımı: Görüntüyü Otomatik Okuyan, Haritaya Dönüştüren Akıllı İş Akışı
Derin öğrenme modelleri ile görüntüden otomatik nesne çıkarımında amaç yalnızca görüntü üzerinde renkli maskeler üretmek değildir. Asıl hedef, görsel veriyi mühendislik ve karar süreçlerinde kullanılabilecek koordinatlı, sınıflandırılmış, ölçülebilir ve raporlanabilir veriye dönüştürmektir.
UTEK Mühendislik yaklaşımında süreç şu şekilde ele alınabilir:
Proje ihtiyacı ve çıkarılacak nesne sınıfları belirlenir.
Drone, ortofoto, uydu, termal veya saha görüntüleri hazırlanır.
Görüntüler kalite ve çözünürlük açısından kontrol edilir.
Gerekirse proje özelinde eğitim verisi hazırlanır.
Derin öğrenme modeli seçilir veya özel olarak eğitilir.
Nesne tespiti, segmentasyon veya sınıflandırma uygulanır.
Model çıktıları CBS/CAD/BIM iş akışına uygun hale getirilir.
Alan, sayı, uzunluk, değişim ve doğruluk raporları üretilir.
Uzman kontrolü ile nihai veri teslim edilir.
Bu yaklaşım sayesinde:
Büyük görüntü setleri çok daha hızlı analiz edilir.
Bina, yol, ağaç, stok, panel, hasar, çatlak, şantiye imalatı veya altyapı elemanları otomatik çıkarılabilir.
CBS ve dijital ikiz sistemleri için güncel veri katmanları üretilebilir.
Manuel sayısallaştırma süresi azalır.
Periyodik izleme projelerinde değişimler daha hızlı tespit edilir.
Şantiye, maden, enerji, belediye ve çevre projelerinde karar süreçleri güçlenir.
Görüntü verisi yalnızca görsel arşiv değil, akıllı mekânsal bilgi kaynağı haline gelir.
Geleceğin Haritacılığında Görüntüler Sadece İzlenmeyecek, Otomatik Olarak Okunacak
Drone, uydu, termal, mobil haritalama ve saha görüntüleri artık modern geomatik iş akışlarının en önemli veri kaynakları arasında yer alıyor. Ancak bu görüntülerin gerçek değeri, yalnızca yüksek çözünürlüklü olmalarından değil, içerdikleri nesne ve bilgilerin doğru şekilde çıkarılabilmesinden geliyor.
Derin öğrenme modelleri ile görüntüden otomatik nesne çıkarımı, bu dönüşümün temel teknolojilerinden biridir. Görüntü içindeki bina, yol, araç, ağaç, çatı, panel, stok, hasar, çatlak, şantiye imalatı, su baskını, maden yüzeyi veya altyapı elemanları otomatik olarak tespit edilebilir, sınıflandırılabilir ve koordinatlı veri katmanlarına dönüştürülebilir.
Bu teknoloji manuel iş yükünü azaltır, büyük alanlarda hızlı analiz sağlar, veri üretim standardını güçlendirir ve CBS, BIM, dijital ikiz, şantiye yönetimi, maden planlama, belediye envanteri, enerji denetimi, afet yönetimi ve çevresel izleme süreçlerine doğrudan katkı sunar.
Ancak doğru kullanım için eğitim verisi, model seçimi, görüntü kalitesi, çıktı işleme, kalite kontrol ve uzman doğrulaması büyük önem taşır. Yapay zekâ güçlü bir hızlandırıcıdır; mühendislik doğruluğu ise hâlâ doğru veri, doğru yöntem ve uzman kontrolüyle sağlanır.
Kısacası, geleceğin geomatik üretiminde görüntüler yalnızca bakılan fotoğraflar olmayacak. Derin öğrenme modelleri sayesinde görüntüler otomatik okunacak, nesneler çıkarılacak, değişimler izlenecek ve görsel veri doğrudan karar destek sistemlerine bağlanacaktır. Bu yaklaşım, haritacılık ve mühendislikte veri üretimini daha hızlı, daha akıllı ve daha ölçeklenebilir hale getiren en önemli dijital dönüşüm adımlarından biridir.



Yorumlar